
In this example we connect a HC-SR04 Ultrasonic ranging module to a Pyboard
Ultrasonic ranging module HC – SR04 provides 2cm – 400cm non-contact measurement function, the ranging accuracy can reach to 3mm. The modules includes ultrasonic transmitters, receiver and control circuit.

The basic principle of work:
(1) Using IO trigger for at least 10us high level signal,
(2) The Module automatically sends eight 40 kHz and detect whether there is a pulse signal back.
(3) IF the signal back, through high level , time of high output IO duration is the time from sending ultrasonic to returning.
Test distance = (high level time×velocity of sound (340M/S) / 2
You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo. The Echo is a distance object that is pulse width and the range in proportion . You can calculate the range through the time interval between sending trigger signal and receiving echo signal.
Formula: uS / 58 = centimeters or uS / 148 =inch; or: the range = high level time * velocity (340M/S) / 2; we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal.
Parts List
Connection
Wire connecting direct as following:
3v3 Supply
Trigger Pulse Input
Echo Pulse Output
0V Ground
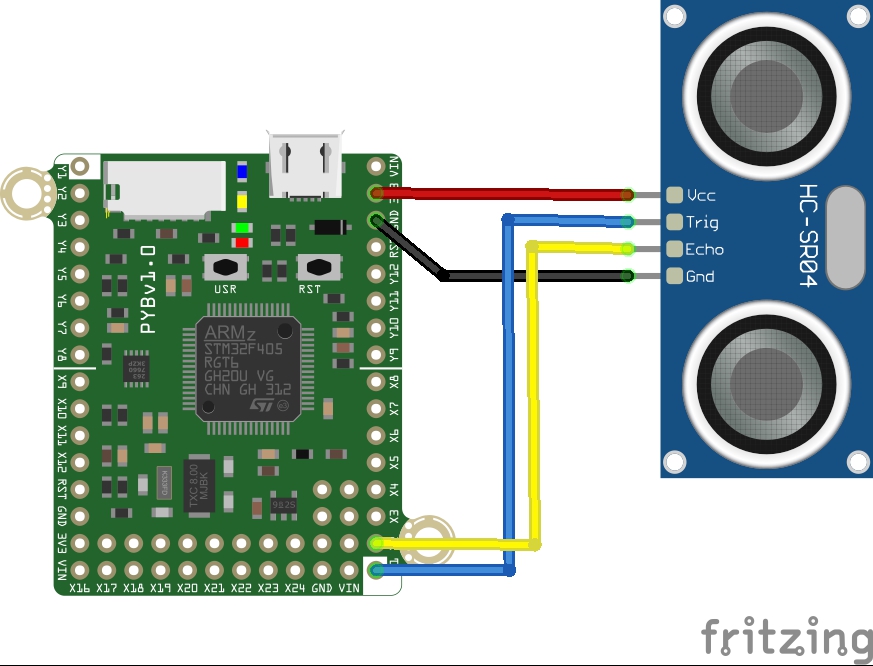
pyboard and hc-sr04
Code
2 parts to this an ultrasonic library
[codesyntax lang=”python”]
##
# Ultrasonic library for MicroPython's pyboard.
# Compatible with HC-SR04 and SRF04.
#
# Copyright 2014 - Sergio Conde Gómez <skgsergio@gmail.com>
#
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU General Public License as published by
# the Free Software Foundation, either version 3 of the License, or
# (at your option) any later version.
#
# This program is distributed in the hope that it will be useful,
# but WITHOUT ANY WARRANTY; without even the implied warranty of
# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
# GNU General Public License for more details.
#
# You should have received a copy of the GNU General Public License
# along with this program. If not, see <http://www.gnu.org/licenses/>.
##
import pyb
# Pin configuration.
# WARNING: Do not use PA4-X5 or PA5-X6 as the echo pin without a 1k resistor.
class Ultrasonic:
def __init__(self, tPin, ePin):
self.triggerPin = tPin
self.echoPin = ePin
# Init trigger pin (out)
self.trigger = pyb.Pin(self.triggerPin)
self.trigger.init(pyb.Pin.OUT_PP, pyb.Pin.PULL_NONE)
self.trigger.low()
# Init echo pin (in)
self.echo = pyb.Pin(self.echoPin)
self.echo.init(pyb.Pin.IN, pyb.Pin.PULL_NONE)
def distance_in_inches(self):
return (self.distance_in_cm() * 0.3937)
def distance_in_cm(self):
start = 0
end = 0
# Create a microseconds counter.
micros = pyb.Timer(2, prescaler=83, period=0x3fffffff)
micros.counter(0)
# Send a 10us pulse.
self.trigger.high()
pyb.udelay(10)
self.trigger.low()
# Wait 'till whe pulse starts.
while self.echo.value() == 0:
start = micros.counter()
# Wait 'till the pulse is gone.
while self.echo.value() == 1:
end = micros.counter()
# Deinit the microseconds counter
micros.deinit()
# Calc the duration of the recieved pulse, divide the result by
# 2 (round-trip) and divide it by 29 (the speed of sound is
# 340 m/s and that is 29 us/cm).
dist_in_cm = ((end - start) / 2) / 29
return dist_in_cm
[/codesyntax]
Now you copy that file to your Pyboard and then modify main.py as follows
[codesyntax lang=”python”]
import pyb
import ultrasonic
# setting pins to accomodate Ultrasonic Sensor (HC-SR04)
sensor1_trigPin = pyb.Pin.board.X1
sensor1_echoPin = pyb.Pin.board.X2
# sensor needs 5V and ground to be connected to pyboard's ground
# creating two Ultrasonic Objects using the above pin config
sensor1 = ultrasonic.Ultrasonic(sensor1_trigPin, sensor1_echoPin)
# using USR switch to print the sensor's values when pressed
switch = pyb.Switch()
# function that prints each sensor's distance
def print_sensor_values():
# get sensor1's distance in cm
distance1 = sensor1.distance_in_cm()
print("Sensor1 (Metric System)", distance1, "cm")
# prints values every second
while True:
print_sensor_values()
pyb.delay(1000)
[/codesyntax]
Testing
Open up the REPL window. Here is what I saw
Sensor1 (Metric System) 0.3965517 cm
Sensor1 (Metric System) 0.3793103 cm